The typical bayesian interview question, solved with PyMC3
programming
ai
Published
September 27, 2021
Here is a statement I saw multiple times online. I also received it once during a Data Science interview. I was not sure at first how to fully solve it.
The problem:
You’re about to get on a plane to Seattle. You want to know if you should bring an umbrella. You call 3 random friends of yours who live there and ask each independently if it’s raining. Each of your friends has a 2/3 chance of telling you the truth and a 1/3 chance of messing with you by lying. All 3 friends tell you that “Yes” it is raining. What is the probability that it’s actually raining in Seattle?
A first way to solve it
You can solve the problem by applying the rule of bayes.
We are looking for the probability that it rains, given that we had 3 yes.
Through the bayes formula, this can be reformulated as [the probability that we have 3 yes, given that it rains] * [the probability that it rains] / [the probability of having 3 yes]
Using the bayes formula
We want to get p(rain | 3xYes)
p(rain | 3xYes) = (p(3xYes | rain ) * p(rain)) / P(3xYes) # Bayes formula
p(rain | 3xYes) = (((2/3)^3 ) * p(rain)) / P(3xYes) # If it rains, there is (2/3)^3 chances of having 3xYes
p(rain | 3xYes) = ((8/27) * p(rain)) / P(3xYes)
p(rain | 3xYes) = ((8/27) * p(rain)) / (P(3xYes | rain) p(rain) + P(3xYes | not_rain) p (not_rain)) # The chances of having 3xYes are the chances
# of having it when it rains, added to chances
# of having it when it does not rain
p(rain | 3xYes) = ((8/27) * p(rain)) / (8/27) p(rain) + (1/27) p (not_rain))
p(rain | 3xYes) = ((8) * p(rain)) / (8 p(rain) + ( 1- p (rain) ))
p(rain | 3xYes) = ((8) * p(rain)) / (7 p(rain) + ( 1 ))
Choosing a prior
Now that you did that, you are left with a formula that depends on the probability that it rains. You can choose a prior for what you consider your a-priori belief on the chances of raining, and plug it in.
For example, if you chose the prior p(rain) = 0.5, it gives.
p(rain | 3xYes) = 0.8888
The same problem as code
You can use the python library PyMC3 to model such interactions. Here for example, I start with a rain prior distribution with a probability of 0.5. I then construct the probability of hearing a “yes” as a transformation of that rain distribution. This gives me a Bernouilly distribution of the event “hearing a yes”.
This is the event that is observed 3 times in the riddle. This is represented by the observed = [1,1,1].
We can then solve that model with pm.sample, and sample the posterior distribution with pm.sample_posterior_predictive. This gives us an expected value for the rain of 0.8878 (this can vary as this is a random process). This is very close to what we computed above !
with pm.Model() as model: # model the problem rain = pm.Bernoulli("rain", p=0.5) p_yes = rain *2/3+ (1-rain) *1/3 likelihood = pm.Bernoulli("likelihood", p=p_yes, observed=[1,1,1]) # solve it trace = pm.sample(5_000, chains=2, ) samples = pm.sample_posterior_predictive(trace, var_names=["rain"], samples=10_000)pm.traceplot(trace)print("Posterior sampling of rain: ", samples['rain'].mean())
FutureWarning: In v4.0, pm.sample will return an `arviz.InferenceData` object instead of a `MultiTrace` by default. You can pass return_inferencedata=True or return_inferencedata=False to be safe and silence this warning.
trace = pm.sample(5_000, chains=2, )
Multiprocess sampling (2 chains in 4 jobs)
BinaryGibbsMetropolis: [rain]
Sampling 2 chains for 1_000 tune and 5_000 draw iterations (2_000 + 10_000 draws total) took 11 seconds.
100.00% [10000/10000 00:00<00:00]
DeprecationWarning: The function `traceplot` from PyMC3 is just an alias for `plot_trace` from ArviZ. Please switch to `pymc3.plot_trace` or `arviz.plot_trace`.
pm.traceplot(trace)
/Users/rodolphe_cambier/miniconda3/lib/python3.8/site-packages/arviz/data/io_pymc3.py:96: FutureWarning: Using `from_pymc3` without the model will be deprecated in a future release. Not using the model will return less accurate and less useful results. Make sure you use the model argument or call from_pymc3 within a model context.
warnings.warn(
Posterior sampling of rain: 0.8953
Quantifying uncertainty
However, that solution seems incomplete to me. When we say we have a prior of p(rain) = 0.5, what is our confidence in that prior ? If we are absolutely certain, then new information should not influence us. If 0.5 was just a random guess, than we should only use new information.
For that reason, I think it is more complete to state the problem using distributions to represent our belief.
In order to do that, I will replace the 0.5 value in the rain prior by another distribution. This distribution, that I call p_rain, will represent my belief in the different potential values of p in the Bernouilli distribution.
I can now use a Uniform distribution to represent that I don’t know anything. I can use a more informative prior to represent some knowledge. I can even use the output of another Bayesian model as the input for this one !
If I use the Uniform prior, we can see that it is similar to using the p=0.5 from aboe in the Bernouilli distribution, and leads to an expected value of 0.889 for the rain event.
But what is very nice now, is that we have a visualisiation of our belief! In the p_rain graph that you see below, you can check for every value of the probability of rain what our belief is.
import pymc3 as pmwith pm.Model() as model: # model the problem p_rain = pm.Uniform("p_rain", 0, 1) # this will now represent our belief rain = pm.Bernoulli("rain", p=p_rain) # we plug it in here p_yes = rain *2/3+ (1-rain) *1/3 likelihood = pm.Bernoulli("likelihood", p=p_yes, observed=[1,1,1])# solve it trace = pm.sample(5_000, chains=2) samples = pm.sample_posterior_predictive(trace, var_names=["rain"], samples=10_000)pm.traceplot(trace)print("Posterior sampling of rain: ", samples['rain'].mean())
FutureWarning: In v4.0, pm.sample will return an `arviz.InferenceData` object instead of a `MultiTrace` by default. You can pass return_inferencedata=True or return_inferencedata=False to be safe and silence this warning.
trace = pm.sample(5_000, chains=2)
Multiprocess sampling (2 chains in 4 jobs)
CompoundStep
>NUTS: [p_rain]
>BinaryGibbsMetropolis: [rain]
Sampling 2 chains for 1_000 tune and 5_000 draw iterations (2_000 + 10_000 draws total) took 14 seconds.
100.00% [10000/10000 00:00<00:00]
DeprecationWarning: The function `traceplot` from PyMC3 is just an alias for `plot_trace` from ArviZ. Please switch to `pymc3.plot_trace` or `arviz.plot_trace`.
pm.traceplot(trace)
/Users/rodolphe_cambier/miniconda3/lib/python3.8/site-packages/arviz/data/io_pymc3.py:96: FutureWarning: Using `from_pymc3` without the model will be deprecated in a future release. Not using the model will return less accurate and less useful results. Make sure you use the model argument or call from_pymc3 within a model context.
warnings.warn(
Posterior sampling of rain: 0.8882
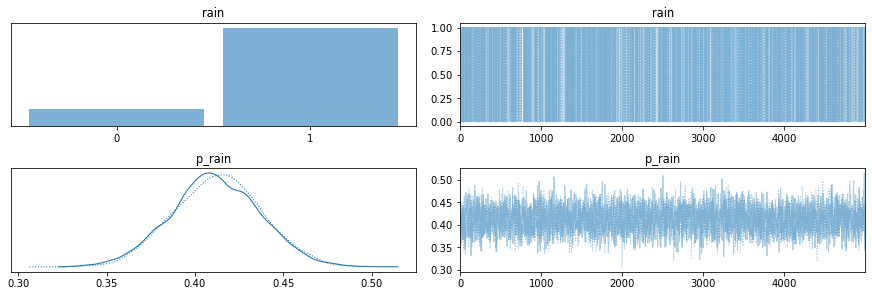
Using an informative prior
We can also use a prior where we include some a-priori knowledge. For example, if we know that it rained 150 days last year, we could use a beta distribution with alpha=150 and beta=215 to represent that knowledge. (I don’t explain here why such a distribution would encode that knowledge. It could for example be the posterior of a previous modelling effort.)
The chances of rain are now 0.8445. This is less than before. Notice also how our p_rain distribution represents a different belief. Way more centered around 0.41.
with pm.Model() as model: # model the problem p_rain = pm.Beta("p_rain", 150, 215) # This encodes our beliefs of how much it rains in Seattle rain = pm.Bernoulli("rain", p=p_rain) p_yes = rain *2/3+ (1-rain) *1/3 likelihood = pm.Bernoulli("likelihood", p=p_yes, observed=[1,1,1]) # solve it trace = pm.sample(5_000, chains=2) samples = pm.sample_posterior_predictive(trace, var_names=["rain"], samples=10_000)print("Posterior sampling of rain: ", samples['rain'].mean())pm.traceplot(trace)
FutureWarning: In v4.0, pm.sample will return an `arviz.InferenceData` object instead of a `MultiTrace` by default. You can pass return_inferencedata=True or return_inferencedata=False to be safe and silence this warning.
trace = pm.sample(5_000, chains=2)
Multiprocess sampling (2 chains in 4 jobs)
CompoundStep
>NUTS: [p_rain]
>BinaryGibbsMetropolis: [rain]
Sampling 2 chains for 1_000 tune and 5_000 draw iterations (2_000 + 10_000 draws total) took 11 seconds.
100.00% [10000/10000 00:00<00:00]
Posterior sampling of rain: 0.849
DeprecationWarning: The function `traceplot` from PyMC3 is just an alias for `plot_trace` from ArviZ. Please switch to `pymc3.plot_trace` or `arviz.plot_trace`.
pm.traceplot(trace)
/Users/rodolphe_cambier/miniconda3/lib/python3.8/site-packages/arviz/data/io_pymc3.py:96: FutureWarning: Using `from_pymc3` without the model will be deprecated in a future release. Not using the model will return less accurate and less useful results. Make sure you use the model argument or call from_pymc3 within a model context.
warnings.warn(